"Электромеханика в космосе" - читать интересную книгу автора (Иосифьян Андраник Гевондович)
ЭЛЕКТРОМЕХАНИКА КОСМИЧЕСКИХ СТАЦИОНАРНЫХ АППАРАТОВ
Электромеханика самоходного аппарата «Луноход». Современный уровень развития космической техники позволил осуществить вывод на окололунную орбиту космического аппарата с посадочным блоком для спуска на поверхность Луны. С помощью такого посадочного блока на поверхность Луны были, в частности, доставлены «Луноходы».
Прообразом «Лунохода» является электротрактор на колесном ходу, который имеет соответствующие аккумуляторные батареи и электрический привод, соединенный с ходовой частью и снабженный аппаратурой регулирования. Особенность «Лунохода» заключается в том, что на нем установлены несколько двигателей, встроенных в механизмы движения колес. Регулирование этих двигателей и изменение направления их вращения обеспечиваются соответствующим автоматом в зависимости от заданной программы или с помощью радиокоманд, поступающих с Земли. «Луноход» снабжен соответствующей фототелевизионной системой и электромеханическими приборами ориентации и управления, позволяющими через свои радиоприемные устройства получать из центра управления соответствующие радиокоманды, осуществлять движение и маневры.
Электромеханика автоматической межпланетной станции «Викинг». Американская межпланетная станция «Викинг» состоит из двух блоков: орбитального и посадочного. Орбитальный блок предназначен для вывода научной аппаратуры на орбиту искусственного спутника Марса и снабжен соответствующими радиотехническими системами и антеннами, обеспечивающими, в частности, связь посадочного блока с наземными приемными станциями.
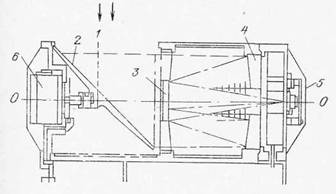 |
Рис. 17. Инфракрасный радиометр станции «Викинг»
Электромеханические системы орбитального блока не отличаются существенно от применяемых в типовых искусственных спутниках Земли. Однако для большей надежности в них введено двухкратное резервирование наиболее важных бортовых систем: ориентации, стабилизации, измерительных датчиков, электрогироскопов и управляемых электромеханизмов. Система энергопитания состоит из солнечных батарей с автоматической электромеханической системой ориентации на Солнце и из соответствующих химических батарей.
Наибольший интерес представляет электромеханический инфракрасный радиометр (рис. 17) для фотографирования и измерения температуры на поверхности Марса. Принцип его конструкции заключается в следующем. Зеркальный искатель 2 перемещается в пространстве вдоль главной оптической оси О — О. В зависимости от модификации ИК-радиометр имеет электромеханизм либо линейных, либо вращательных перемещений. Пространственное перемещение вокруг оси измеряется прецизионным датчиком с точностью в пределах нескольких угловых минут. Этот датчик регистрирует пространственное положение зеркала-искателя и с помощью электронного устройства регулирует линейные или вращательные движения элементов электродвигателя 6.
Излучение, поступающее через вход радиометра 1, после отражения от зеркала-искателя 2 попадает на оптическую систему с двойным отражением 3–4 и далее через световоды и светофильтры — на чувствительный приемник или электронный фотоумножитель 5. Электронный усилительный блок усиливает полученные видеосигналы и передает изображения через канал радиосвязи на наземные станции приема. Таким образом, телевизионные изображения в форме видеосигналов при движении орбитального блока по траектории вокруг Марса определяются механическим движением сканирующего зеркала-искателя. Чтобы получить такое же изображение на фоточувствительной пленке, необходимо иметь на приемном пункте синхронное и синфазное электромеханическое оптическое устройство, физические принципы которого были описаны в разделе о функциональных системах.
Если для искусственных спутников Земли, в том числе для геостационарных, движущихся в околоземном пространстве на расстоянии до 36 тыс. км от Земли, проблема передачи видеосигналов с использованием синхронных и синфазных электрических машин является относительно простой задачей, то передача изображения с планет, отстоящих от Земли на расстоянии нескольких сотен миллионов километров, чрезвычайно сложна технически. Эта проблема, в частности, требует точных приборов измерения времени и радиотехнических средств для синхронизации импульсов, обеспечивающих синхронное и синфазное движение электродвигателей при возможных электромагнитных помехах в. радиотракте на дальних расстояниях.
Посадочный блок межпланетной станции «Викинг» конструктивно выполнен (рис. 18) в виде шестигранной платформы, на которой размещены основные системы и устройства. Система энергопитания состоит из двух радиоизотопных термоэлектрогенераторов 1, осуществляющих прямое преобразование тепловой энергии в электрическую с помощью полупроводниковых элементов, охлаждаемых специальным образом. В систему входят также аккумуляторные батареи, подключаемые в момент потребления максимальной мощности. Грунтозаборное устройство 2 посадочной станции предназначено для сбора образцов грунта с участков поверхности площадью в несколько десятков квадратных метров, а также для выполнения исследований и анализа микро- и макроструктуры грунта, в том числе биологического. Устройство смонтировано на телескопической штанге, с помощью которой оно может выдвигаться на несколько метров и поворачиваться как в вертикальной, так и в горизонтальной плоскостях.
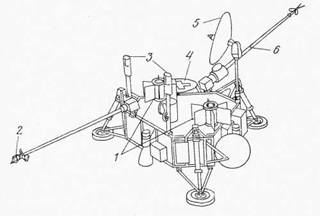 |
Рис. 18. Общий вид посадочного блока «Викинга»
Для поступательных и угловых перемещений устройства попользуются электрические двигатели постоянного тока: два — для поворотов, один — для поступательных перемещений телескопической штанги, еще один — для вращения грунтозаборного устройства.
В грунтозаборном устройстве применяются машины постоянного тока с щетками и коллекторами. Эти узлы герметизированы, чтобы щеточная пыль не попадала в отобранные для исследований порции грунта. Однако в рассматриваемом случае применение бесколлекторных и бесщеточных электродвигателей постоянного тока, по мнению автора, представляется более целесообразным.
Система автоматического управления грунтозаборного устройства обеспечивает подачу грунта в соответствующую камеру. На шестигранной платформе посадочного блока расположены также телевизионные камеры 3, радиотрансляционная антенна 4, остронаправленная антенна с электроприводом 5 и штанга 6 с метеорологическими приборами для исследований явлений в области метеорологии и сейсмологии.
Космические астрономические обсерватории. В предыдущих разделах мы рассмотрели электромеханические системы и отдельные устройства, которые с успехом применяются в современной космической технике. Однако уже сейчас возникают новые направления электромеханики в космосе, требующие разрешения трудных, но принципиально важных проблем.
За последние годы все чаще и чаще в программу искусственных спутников Земли, пилотируемых кораблей, орбитальных станций стали входить астрофизические и астрономические исследования.
Как известно, влияние земной атмосферы сильно сказывается на наблюдениях, проводимых наземными оптическими телескопами, и ограничивает их разрешающую способность. Поэтому вывод оптических телескопов достаточно большого диаметра за пределы атмосферы, на орбиту вокруг Земли сейчас разрабатывается специалистами различных стран.
Многочисленные исследования по внеатмосферной астрономии и физике околоземного пространства были проведены на «Протоне», «Союзе», «Салюте». На космическом корабле «Союз-13», например, с целью получения ультрафиолетовых спектрограмм звезд была установлена бортовая обсерватория «Орион-2».
Для того чтобы обеспечить точное автоматическое наведение телескопа этой космической обсерватории, установленного вне корпуса корабля, на заданную звезду, была создана ступенчатая система управления. Ее первая ступень предусматривала участие космонавта, который находясь внутри корабля, должен был манипулировать специальной системой визирования, установленной напротив одного из иллюминаторов корабля, и ориентировать «связку» телескопов с помощью звездных фотогидов на исследуемую звезду. После захвата звезды вступала в действие автоматическая электромеханическая система слежения, обеспечивающая достаточную точность, чтобы сфотографировать на весьма чувствительную пленку спектрограмму звездного излучения.
На обсерватории «Орион-2» была установлена трехосная стабилизированная платформа, несущая телескопы и звездные датчики. Трехосная стабилизация осуществлялась за счет одновременного визирования двух опорных звезд. Электрические сигналы рассогласования через усилительную систему поступали на управляющие обмотки электродвигателей, связанных с телескопами через волновые редукторы. Во время фотографирования звезд «Союз-13» ориентировался при помощи построителя местной вертикали с точностью до нескольких угловых градусов. Однако так как для фотографирования необходимо было иметь точность стабилизации в несколько угловых секунд, то была создана малогабаритная следящая система с электродвигателями постоянного тока и полупроводниковая система регулирования с генераторами обратной связи, обеспечивающие необходимую точность стабилизации телескопов.
Результаты этого полета позволили получить спектрограммы далеких звезд (величиной 10–13m) в ультрафиолетовом диапазоне, что невозможно осуществить с помощью наземной аппаратуры. Тем самым, рассмотренная бортовая астрономическая обсерватория «Орион-2» внесла большой вклад во внеатмосферную астрономию, хотя и имела очень малый диаметр телескопа.
За последние годы в США с привлечением крупнейших ученых других стран проектируется «Большой космический телескоп» диаметром зеркала 3 м, который предполагается вывести на круговую орбиту высотой 360 км. Эта астрономическая обсерватория — спутник, корпус которого одновременно является корпусам телескопа. На рис. 19 представлена оптико-электронная схема телескопа. С помощью «Большого космического телескопа» можно будет изучать очень слабые небесные объекты до звездной величины +29m (с помощью самых мощных наземных телескопов можно исследовать лишь объекты до величины +22m). Точность стабилизации движения изображения внутри космического телескопа предполагается до 0,005". Основным элементом космического телескопа является оптическая труба, научные приборы и модуль ориентации. Панели солнечных батарей должны снабжать космический телескоп и всю обсерваторию электроэнергией. Ориентацию и стабилизацию «Большого космического телескопа» по трем строительным осям предполагается осуществлять с помощью отмеченной выше комбинированной трехступенчатой системы: электродвигателем-маховиком, силовым моментным электрогироскопом и космическим моментным магнитодвигателем или газореактивной системой малой тяги.
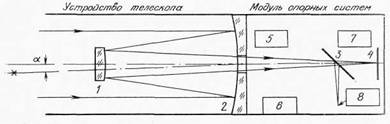 |
Рис. 19. Оптико-электронная схема «Большого космического телескопа»:
1, 2, 3 и 4 — оптические зеркала; 5 — вычислительный модуль; 6 — прецизионные гироскопы-датчики; 7 — моментные электрогироскопы; 8 — датчики точного наведения; α — угол отклонения от заданного направления
Структурная схема силового моментного электрогироскопа (по одной из строительных осей) представлена на рис. 9.
Одной из проблем, возникших при проектировании телескопа, была необходимость стабилизации движения изображения с точностью 0,005" (от среднеквадратичного значения), требуемой для получения максимального выигрыша по сравнению с наземными дифракционными телескопами (имеющими относительно слабое разрешение). На первом этапе решения этой проблемы пытались создать систему управления, использующую вторичное зеркало стабилизации, с точностью ±1". При дальнейшей разработке «Большого космического телескопа» использовались модели, рассчитанные с помощью ЭВМ, на которых сравнивались методы стабилизации и ориентации, использующие моментный гироскоп и электрореактивные маховики при различных внешних воздействиях. Эти экспериментальные исследования показали, что в принципе планируемая точность стабилизации спутника вполне возможна. Однако перед конструкторами встали весьма трудные проблемы, для разрешения которых потребуются «ропотливые экспериментальные исследования вибрации электрореактивных маховиков, возникающей гари дебалансе и в зонах нечувствительности в измерительных приборах. Каждый из этих факторов может ухудшить стабилизацию. Корабль с космическим телескопом имеет форму усеченного конуса. Центр пересечения основных строительных осей спутника размещен в центре его масс. Управление телескопом (в целом) осуществляется бортовой ЭВМ, на выходе которой имеются внешние блоки управления электромеханическими исполнительными органами телескопа.
Быстродействующие внешние моменты воспринимаются электродвигателями-маховиками, которые после «насыщения» разоружаются с помощью силовых гироскопов стабилизации. Принцип электромеханического управления заключается в том, что в момент торможения с помощью противотока в роторе электродвигателя-маховика подается команда не на газореактивный двигатель или моментный магнитодвигатель, а на моментный электродвигатель (ЭД) (см. рис. 9) силового электрогироскопа стабилизатора. В результате гироскоп (Г) поворачивается на некоторый угол, воспринимая на себя, как это следует из законов механики, кинетический момент электродвигателя-маховика. После достижения некоторого угла поворота, называемого углом «насыщения» силового гироскопа (в отличие от «насыщения» скорости вращения электродвигателя-маховика), подается команда на «разгрузку» угла поворота силового электрогироскопа с помощью газореактивной или магнитомоментной системы исполнительных органов. Таким образом, обеспечивается высокая прецизионность силового управления «Большим космическим телескопом» в пространстве.
| © 2024 Библиотека RealLib.org (support [a t] reallib.org) |